模糊PID控制器是以常规PID为基础,采用模糊推理思想根据不同的e和ec对PID参数kp,ki,kd进行在线自整定,控制器由两部分组成,即常规PID控制部分和模糊推理的参数校正部分。
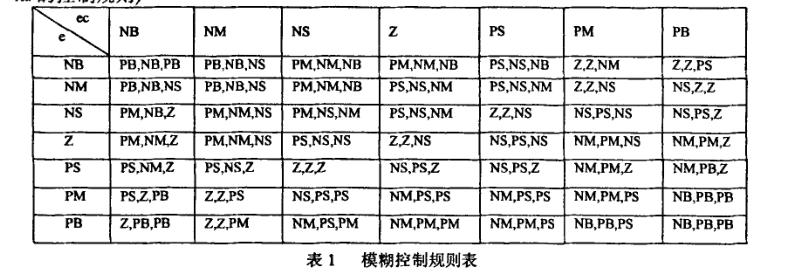
P1D控制器是一种线型控制器,它根据给定r(f)与实际输出值c()构成控制偏差P(f)=厂(f)一c(,)将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控量,对被控对象进行控制。PID参数模糊自整定是找出PID三爷参数与e和ec之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制规则原理对三个参数进行在线修正,而使被控对象由良好的动、静态性能。
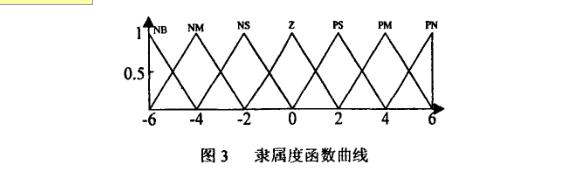
因此P1D参数的调整必须考虑在不同时刻三个参数的作用之间的相互关系。针对真空干燥箱温度控制,在模糊规则中,误差e、误差变化ec和修正系数岛、忽、勋语言变量值取{Na,NM,NS,Z,PS,PM,PB},论域均为{一6,-5,一4,-3,-2,一1,0,1,2,3,4,5,6},考虑到对论域的覆盖程度和灵敏度,稳定性与鲁棒性原则,各模糊子集采用三角形隶属函数。其各变量的隶属度函数曲线如图2所示。
在线运行过程中,控制系统通过对模糊逻辑规则的结果处理,查表和运算,完成PID控制法的自校正,使控制器达到理想。
http://www.dgzhenghang.cn



 400-822-8565贾小姐/15899697899
400-822-8565贾小姐/15899697899




