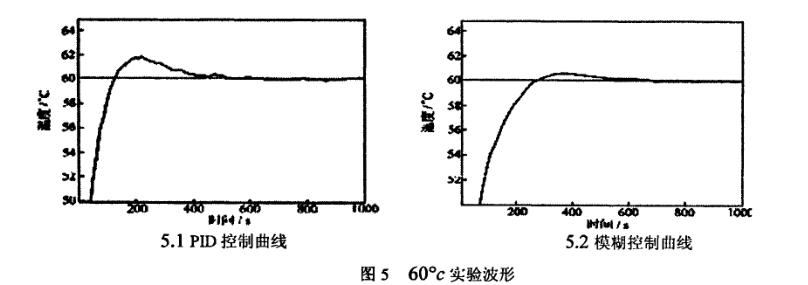
本实验是对真空干燥箱的温度控制,将所设计的模糊控制器应用到本研究的真空干燥箱的温度控制中,并检验实际的控制效果。选定系统的参数,KD=5.25,Ki=35.0,l(d=o.1,将干燥箱温度设在600C,在系统同等条件下分别采用了传统的PID控制和模糊控制的情况下所得到的实际控制曲线如图5所示。
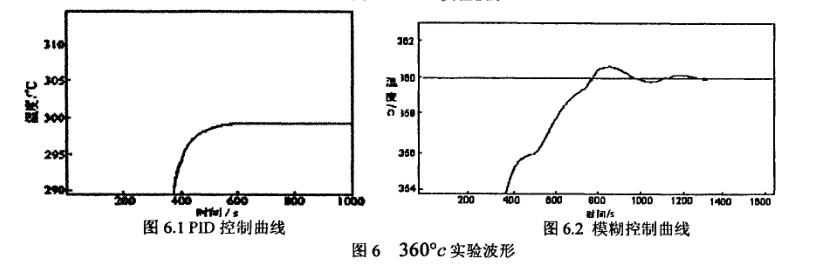
用传统的PID控制,系统的调节时间500s,如图5.1所示。用模糊PID控制,系统的超调量为0.50C,稳定度为±0.20C,调节时间600s,如图5.2所示。如果将温度设在3600C,常规的PID控制就达不到系统温度,如图6.1所示;用模糊PID控制,系统的超调量为0.80C,稳定度为±0.40C,调节时间900s,如图6.2所示。通过对比可以看出,本研究的温度控制系统在采用了模糊控制策略以后,系统在升温阶段的跟随和恒温阶段的保持性都很好,既满足了动态特性的要求也满足了稳态特性的要求。由此可见,模糊控制对被控对象的非线性和时变性有一定的适应能力,同时对噪声也具有较强的抑制力。
常规PID控制系统,参数都是给定值,这样只能在一定的温度范围内控制比较理想,如果超出这个范围,就会出现超调量比较大,稳定度不够好。模糊自整定PID控制算法能够使在不同温度下,控制曲线整体上都比较理想。
而且,当设定控制温度、干燥箱参数和结构发生改变时,控制指标也能达到要求。比例系数岛在控制初期比较大,加快系统的响应速度。当控制温度接近设定温度时,如减小,减小系统的超调量,增强了系统的稳定性。kJ在控制初期较大,加快系统的响应速度,消除静差:当控制温度接近设定温度时,后减小,减小了系统的超调量。肠在控制初期大,改变系统的动态特性,当控制温度接近设定温度时,肠减小,增强了系统的抗干扰能力。
http://www.dgzhenghang.cn



 400-822-8565贾小姐/15899697899
400-822-8565贾小姐/15899697899




